Our Mission
Our research is centered around interactive robot learning. As robots become more commonplace in human environments, they will need to adapt to novel task variations that they have not been trained to address. We develop algorithms that allow a robot to structure and interpret its interactions with a human teacher in order to adapt its task knowledge to novel situations. By enabling a robot to ask for help in addressing unfamiliar problems, our work contributes toward a future of adaptive, collaborative robots.
News
Our paper “Enhancing Goal Inference via Correction Timing” is accepted to AAMAS 2026!
Our paper “TReF-6: Inferring Task-Relevant Frames from a Single Demonstration for One-Shot Skill Generalization” is accepted to CoRL 2025!
Our paper “Effects of Robot Competency and Motion Legibility on Human Correction Feedback” is accepted to HRI 2025!
Our paper “🍅 TOMATO: Assessing Visual Temporal Reasoning Capabilities in Multimodal Foundation Models” is accepted to ICLR 2025!
Highlights
Our Research
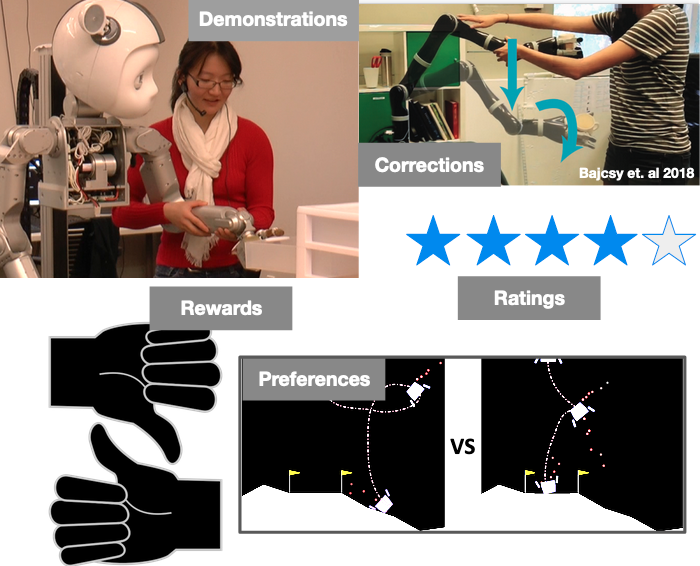
Our research vision comprises of several core pillars: (a) Reasoning over Multiple Interaction Types, (b) Representing Transfer Problems on a Spectrum of Similarity, (c) Trajectory Adaptation for Tool Transfer, and (d) Human-guided Object Mapping for Task Transfer.
Our Projects
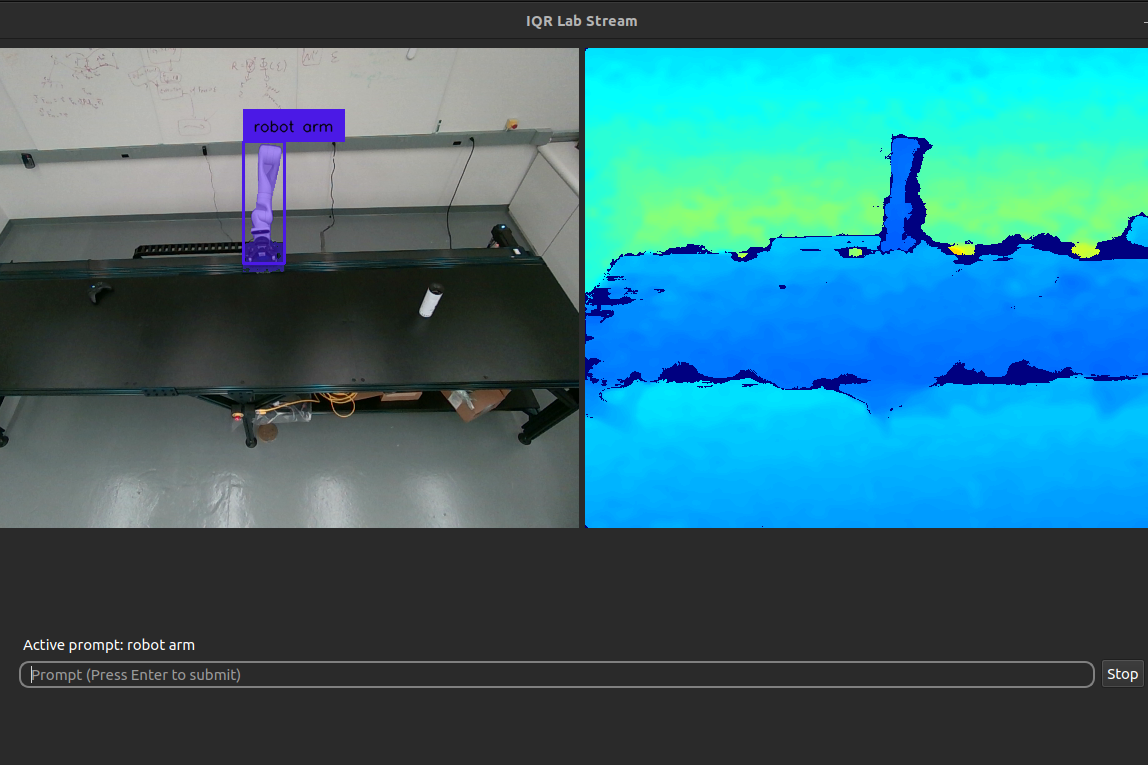
IQR Lab is dedicated to open-sourcing our software. We aim to maintain several packages, applications, datasets, and benchmarks to enable the broader robotics community to build upon our work.

Our Team
IQR Lab is always looking for outstanding and motivated individuals, whether as prospective Ph.D. students, visiting students, interns, or postdoctoral researcher. If you are interested in research opportunities, please visit our Contact page.